Planetary rovers are often imagined as bold explorers crossing alien landscapes. In reality, they work under tight limits. On Mars, even a simple instruction can take minutes to arrive, and every move must be planned carefully to avoid danger. That keeps missions safe, but it also raises a problem: if robots move slowly and stop often, how much of another world can we really study?
A new test points to a different way forward. Instead of treating a robot like a machine that needs constant step-by-step guidance, researchers explored whether it could handle more of the work on its own. The question was simple but important: could a semi-autonomous robot move between several targets, study them one by one, and still return useful science?
The answer, according to new research, is yes, and that could matter for future missions to the Moon, Mars, and beyond.

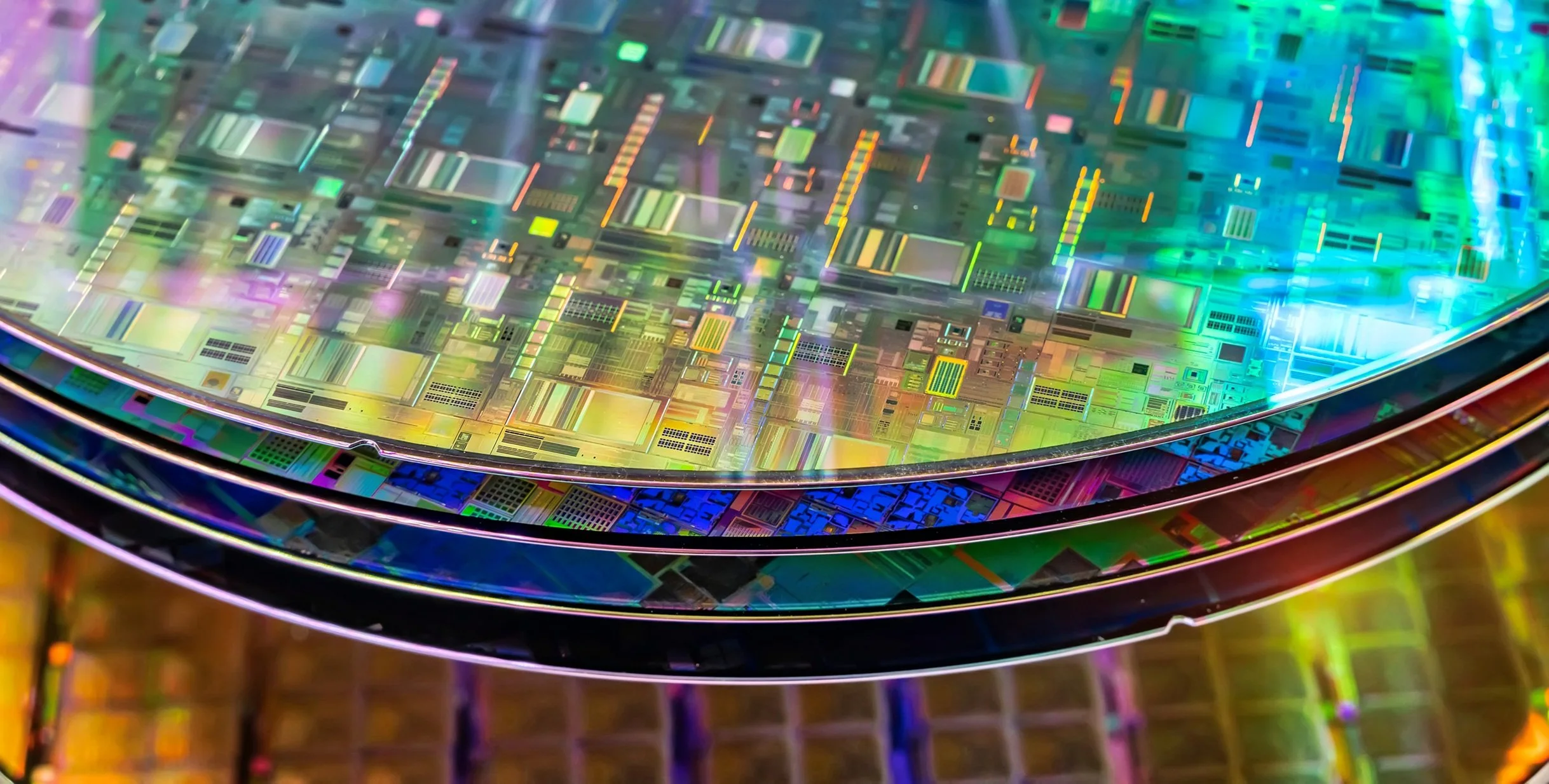
Future robotic missions to Mars could cover more ground by studying several rocks in sequence instead of waiting for step-by-step commands from Earth. - (Image Credit: joshimerbin via Shutterstock / HDR tune by Universal-Sci)
Why today’s missions leave so much unexplored
Current planetary surface missions operate cautiously for good reason. Communication delays between Earth and Mars can range from four to 22 minutes, and limits on sending and receiving data make real-time control impossible. Rovers also need to protect their energy and avoid hazards, so they move slowly across rough terrain.
The result is a careful but narrow style of exploration. Scientists usually plan operations in advance, and rovers may cover only a small part of a landing site. With travel often limited to a few hundred meters per day, collecting a wide range of geological data becomes difficult.
That matters when researchers are looking for signs of past life or scouting useful materials. The more ground a mission can study, the better its chances of finding something important.
What happens when a robot studies several rocks in one trip?
To test a faster approach, researchers used the quadrupedal robot ANYmal. The robot was equipped with a robotic arm carrying two compact instruments: the microscopic imager MICRO and a portable Raman spectrometer developed for the ESA-ESRIC Space Resources Challenge.

Legged robot during analogue testing at the University of Basel’s Marslabor facility - (Image Credit Dr Tomaso Bontognali via EurekAlert)
The team carried out the experiments at the University of Basel’s Marslabor facility, which simulates planetary surface conditions with analogue rocks, regolith materials, and lighting designed to resemble those environments. The work was done in collaboration with the Robotic Systems Lab at ETH Zurich, ETH Zurich | Space, the University of Zurich, and the University of Bern.
In the tests, the robot autonomously moved toward selected targets, positioned its instruments with the robotic arm, and returned images and spectra for analysis. The aim was to see whether a robot with a relatively simple scientific payload could quickly examine several targets while still producing meaningful results.
According to the release, it could. The results showed that even compact instruments were enough to meet the full scientific objective: identifying rocks relevant to astrobiology and resource exploration.
Can faster exploration still deliver good science?
Speed alone is not useful if the science suffers, so the researchers compared two styles of operation. One followed a more traditional pattern, with scientists closely guiding the exploration of a single target. The other used a semi-autonomous strategy in which the robot examined several locations in sequence.
The difference was striking. Multi-target missions took between 12 and 23 minutes. A human-guided mission needed 41 minutes to complete comparable analyses.
Just as important, the faster method still performed well scientifically. In one test run, all selected targets were correctly identified.
The system successfully recognized several rock types that matter for planetary exploration, including gypsum, carbonates, basalts, dunite, and anorthosite. Some of these could be especially useful in future missions. The release notes that lunar-analog rocks such as dunite, anorthosite, and oxides such as rutile may point to valuable resources.
That suggests a practical new role for planetary robots. Rather than waiting for humans to direct every step, they could move across the terrain, scan many rocks quickly, and help scientists focus their attention on the most promising spots.
The main takeaway is clear: future missions may not need to choose between speed and useful science as sharply as they do today. If semi-autonomous robots can cover more ground and identify worthwhile targets on their own, scientists could survey larger areas in less time, improving both resource prospecting and the search for possible signs of past life.
If you are interested in more details about underlying research, be sure to check out the paper published in Frontiers in Space Technologies, listed below this article.
Sources and further reading:
Semi-Autonomous Exploration of Martian and Lunar Analogues with a Legged Robot Using a Raman-Equipped Robotic Arm and Microscopic Imager - (Frontiers in Space Technologies)
If the Universe Is Expanding, What Is It Expanding Into? - (Universal-Sci)
How big is the universe? - (Universal-Sci)
How could the Big Bang arise from nothing? - (Universal-Sci)
How long has gravity existed? - (Universal-Sci)
How do astronomers know the age of the planets and stars? - (Universal-Sci)

Too busy to follow science news during the week? - Consider subscribing to our (free) newsletter - (Universal-Sci Weekly) - and get the 5 most interesting science articles of the week in your inbox
FEATURED ARTICLES:




Scientists may have found an explanation for one of the biggest mysteries about ʻOumuamua that baffled astronomers in 2017.